
ECS50
Positioning controller
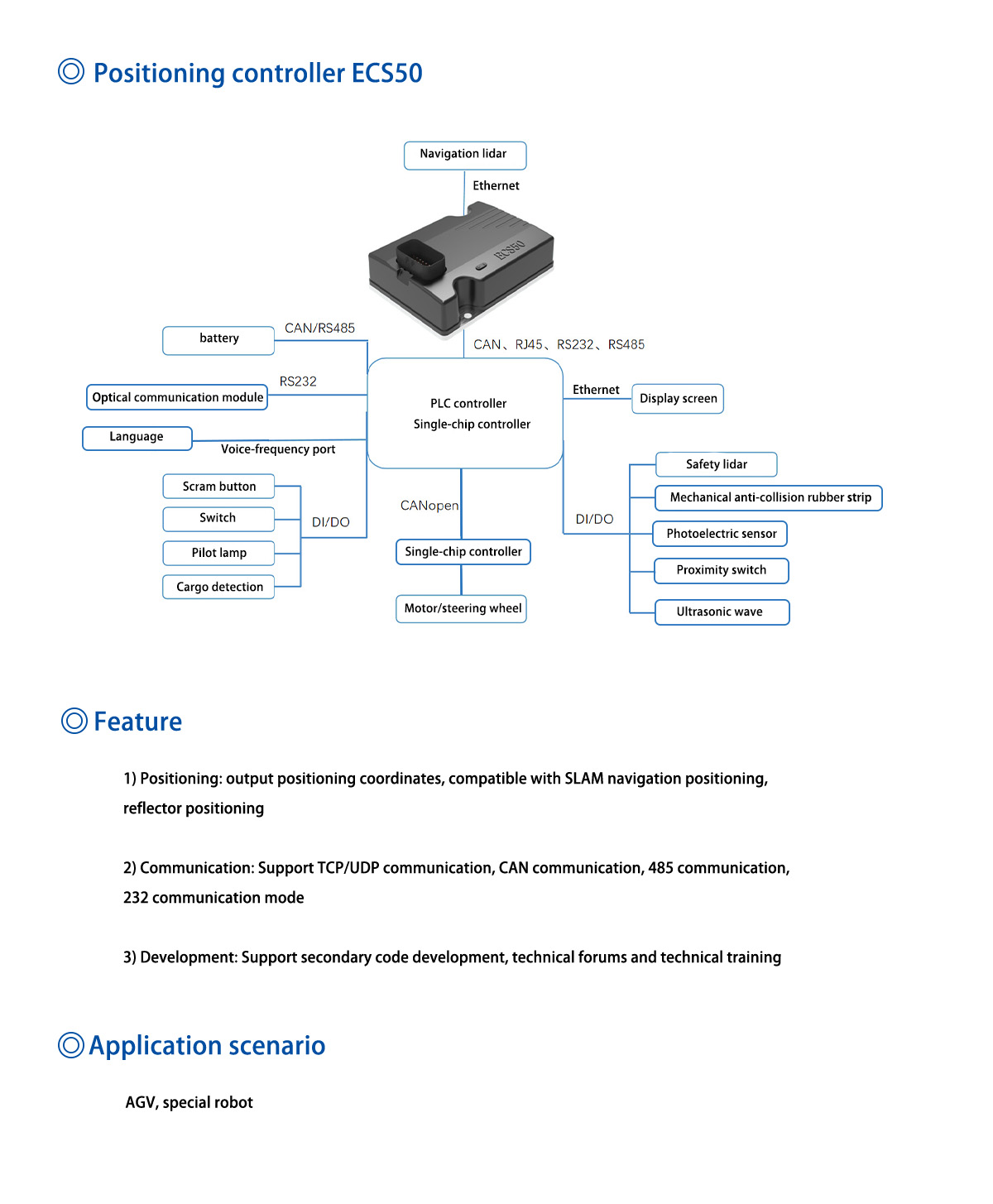
Navigation and positioning controller, real-time output navigation sensor positioning coordinates (X, Y, Thera) Customers according to the model to develop their own control system (algorithm), compatible with SLAM natural environment navigation (accuracy ±10mm~±20mm), reflective navigation (accuracy ±10mm) adapted to a large number of domestic and foreign laser navigation sensors, Other special laser sensors can be adapted.
| Functional item | argument |
| Model number | ECS50 |
| Length * width * height | 145*105*50mm |
| Power source | |
| Input voltage | 18~28V/Vpp<200m (with reverse protection) |
| Current dissipation | Single unit < 0.4A/24V, including peripherals maximum current < 5A (24V) |
| Communication interface | |
| Ethernet | 1000M RJ45 *1 |
| USB3.0 | * 4 |
| CAN | * 2 |
| RS485 | * 1 |
| RS232 | * 1 |
| Input/output interface | |
| input | 5V~24V multifunctional isolation digital input * 8 |
| exportation | Multifunctional isolation output * 4 |
| Audio interface | |
| Voice broadcast | Support (3.5mm audio interface) |
| Indicator port | |
| Pilot lamp | Running status indicator, communication indicator |
| Functional parameter | |
| Positioning accuracy | ±5mm (Reflector navigation), ±10mm (SLAM natural navigation) |
| Navigation speed | ≤1.5m/s |
| Angle control accuracy | ±0.5° |
| Output information | Positioning coordinates (x, y, θ) |
| Motion control | Exclusive of |
| Map Area (Single map) | ≤400000㎡ (Support multi-map navigation) |
| Other functions | |
| Supporting design software | support |
| The accompanying application software | support |
| Functional logic secondary development | support |
